ROS基础编程测试题目
test 01
代码放在本仓库的各个分支中
操作步骤
首先安装ros环境,按照这边的教程 在 openEuler 24.03 上安装 ROS2 Humble
确保你有 colcon 工具包,可以使用pip3安装
pip3 install -U pytest colcon-common-extensions创建工作区
mkdir -p ~/ros2_ws/src/plct-test
cd ~/ros2_ws/src/plct-test
# 创建一个包,名称为 test01 ,采用MIT协议开源
ros2 pkg create test01 --license MIT然后会在 src/plct-test 下创建一个名为 test01 的包
可以把 plct-test 目录创建为git仓库,管理你的项目
# cd ~/ros2_ws/src/plct-test
echo "# test01" >> README.md
git init
# 创建并切换到一个名为test01的分支
git checkout -q -b test01
git add .
git commit -m "first commit"
# 修改为你的仓库地址
git remote add origin https://github.com/your_account/your_repo.git
git push --set-upstream origin test01上面的命令会初始化Git仓库,创建一个test01分支并推送到远程仓库
可以先用colcon build初始化一下工作区
cd ~/ros2_ws
colcon build然后会在顶层目录创建三个文件夹
.
├── build
├── install
├── log
└── src此时,执行 source ~/ros2_ws/install/setup.bash 设置环境,或者添加到.bashrc中
echo "source ~/ros2_ws/install/setup.bash" >> ~/.bashrcROS2 相关概念
TurtleSim 坐标系
在 turtlesim 中,坐标系定义如下:
世界坐标系:
turtlesim的世界坐标系是一个二维平面,原点位于左下角(0, 0),坐标范围从(0, 0)到(11.08, 11.08)X 轴:沿着水平向右增加
Y 轴:沿着垂直向上增加
每只乌龟的姿态包括位置 (x, y) 和朝向 theta,theta 是一个表示乌龟相对于 X 轴的角度(以弧度为单位)
小乌龟的控制方式
在 turtlesim 中,控制乌龟的主要方式包括:
速度控制:通过发布
geometry_msgs::msg::Twist消息到/turtle1/cmd_vel话题,控制乌龟的线速度和角速度linear.x控制乌龟的前进或后退速度angular.z控制乌龟的旋转速度服务调用:ROS 2 提供服务调用来执行特定操作,如生成新乌龟、传送乌龟到指定位置等
/spawn服务:生成新的乌龟,并设置其初始位置和朝向/teleport_absolute服务:将乌龟传送到指定的绝对位置/teleport_relative服务:相对于乌龟的当前位置进行传送
获取小乌龟的位置信息
虽然 turtlesim 不提供传统的里程计(odom)话题,但可以通过订阅 /turtle1/pose 话题获取乌龟的当前位置和朝向信息,达到类似里程计的效果。/turtle1/pose 发布的是 turtlesim::msg::Pose 消息,包含以下字段:
x和y:乌龟的当前位置theta:乌龟的朝向角度linear_velocity和angular_velocity:乌龟的线速度和角速度
ROS 2 的订阅、发布与服务调用
发布(Publisher):通过发布器,程序可以向某个话题发布消息。节点通过向
/turtle1/cmd_vel发布Twist消息控制乌龟的移动订阅(Subscriber):通过订阅器,程序可以订阅某个话题,接收该话题上的消息。节点通过订阅
/turtle1/pose获取乌龟的实时位置信息服务(Service):服务是一种请求-响应机制,可以执行特定任务。比如调用
/spawn服务生成新乌龟,或者调用/teleport_absolute服务将乌龟传送到指定位置
如何构建ROS节点程序
首先,创建好工作区
修改构建配置文件
我们的包目录test01下,有几个文件,我们首先修改package.xml,这个文件主要是用来描述我们的包需要的依赖项
确保里面有下面这几项,这是我们的构建依赖
···
<depend>rclcpp</depend>
<depend>geometry_msgs</depend>
<depend>turtlesim</depend>
···然后修改CMakeLists.txt,我们要给我们的test01包里的每一个程序都添加构建项目
首先我们给第一个C++节点rectangular_motion.cpp添加下面的描述
···
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(turtlesim REQUIRED)
find_package(nav_msgs REQUIRED)
# Add executable
add_executable(rectangular_motion src/rectangular_motion.cpp)
ament_target_dependencies(rectangular_motion rclcpp std_msgs geometry_msgs nav_msgs turtlesim)
# Install the executable
install(TARGETS
rectangular_motion
DESTINATION lib/${PROJECT_NAME})
···这样就可以开始正式编写我们的C++程序了
如果要添加python脚本,需要在CMakeLists.txt中添加下面的几项
···
# find dependencies
find_package(rclpy REQUIRED)
install(
PROGRAMS
scripts/turtle_spawner.py
DESTINATION lib/${PROJECT_NAME}
)
···这样colcon也能正确配置我们的python脚本节点,可以正常使用ros2 run test01 <program-name>调用
代码详解
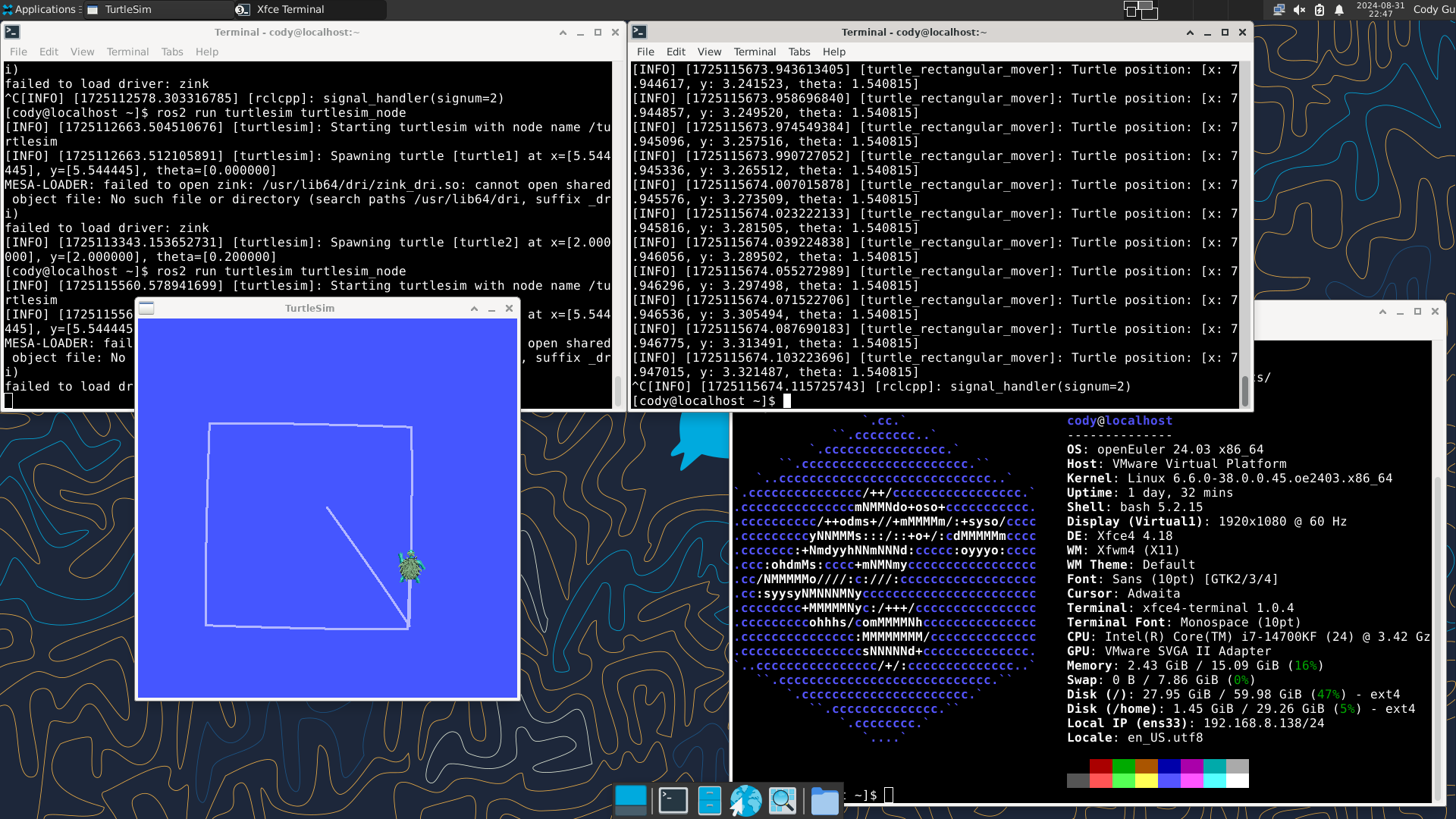
第一个 ros2 C++ 节点通过发布Twist消息让小乌龟跑一个长方形轨迹,并通过订阅 /turtle1/pose 话题获取乌龟的当前位置和朝向信息,调整小乌龟的朝向和移动
# 运行小乌龟节点
ros2 run turtlesim turtlesim_node
# 运行控制节点
ros2 run test01 rectangular_motion存在的问题:
- 现在小乌龟走的路线不够直,可能是和距离判定有关,没走到位置上就朝向下一个点了,所以走得会有点斜,后面可以修改成 PID 控制,并增加控制点
- 由于第一个点是朝向下一个点位的,所以实际上会先走到第二个点,最后才会走到第一个点

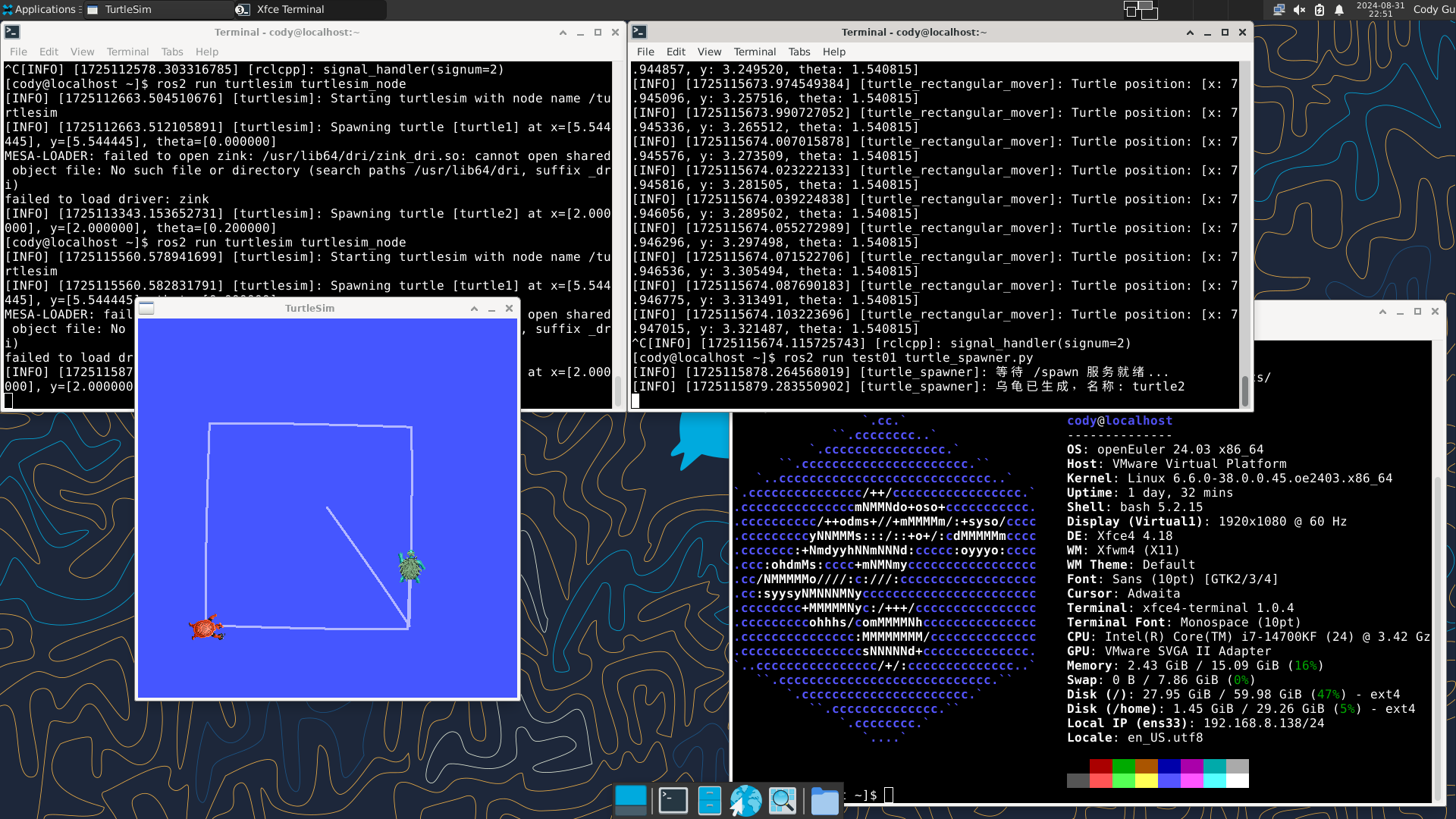
第二个python脚本通过调用 /spawn 服务生成新乌龟,并调用 /teleport_absolute 服务将乌龟传送到指定位置
# 运行小乌龟节点
ros2 run turtlesim turtlesim_node
# 运行生成节点
ros2 run test01 turtle_spawner.py
 Cody Gu
Cody Gu